Center of Mass
Point Object- Assume all mass is located at a single point
Extended Object- Assume mass is distributed throughout the object
So far we have treated everything as a single point at the center of mass, but in this unit we will draw extended force diagrams
Hang Test- Used to find the center of mass
Extended Force diagram- Draw the force where it acts on the object (sketch the shape of the object and draw where the forces act)
Extended Object- Assume mass is distributed throughout the object
So far we have treated everything as a single point at the center of mass, but in this unit we will draw extended force diagrams
Hang Test- Used to find the center of mass
- Hang an object from a point and draw a vertical line
- Hang the object from another point and draw another vertical line
- Intersection = center of mass
Extended Force diagram- Draw the force where it acts on the object (sketch the shape of the object and draw where the forces act)
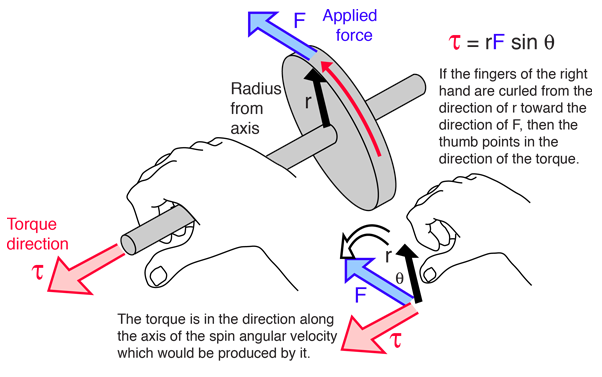
Right Hand Rule
Clockwise / counterclockwise can work but it gets confusing from different perspectives
Use right hand to trace the vector and the thumb points in the direction of the torque
Out of the page = towards you / up
Into the page = away from you / down
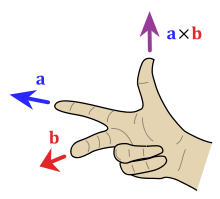
Right Hand Rule 2.0- Use pointer and middle fingers to represent force and torque arm (radius) and your thumb is the direction of the torque
Use right hand to trace the vector and the thumb points in the direction of the torque
Out of the page = towards you / up
Into the page = away from you / down
Right Hand Rule 2.0- Use pointer and middle fingers to represent force and torque arm (radius) and your thumb is the direction of the torque
http://hyperphysics.phy-astr.gsu.edu/hbase/imgmec/vtord.png
|
https://upload.wikimedia.org/wikipedia/commons/thumb/d/d2/Right_hand_rule_cross_product.svg/220px-Right_hand_rule_cross_product.svg.png
|
Rotational Kinematics
Linear Motion |
Rotational Motion |
xi = initial position |
θi = initial angular position |
xf = final position |
θf = final angular position |
∆x = displacement |
∆θ = angular displacement |
v = velocity |
ω = angular velocity |
a = acceleration |
α = angular acceleration |
Units for angular velocity = radians per second
1 revolution = 360° = 2π radians
1 revolution = 360° = 2π radians
Equations (same as linear kinematic equations just with the rotational motion variables)
ω = ω0 + αt
∆θ = ω0∆t + 1/2 α(∆t)^2
ωf^2 = ωi^2 + 2α∆θ
ω = ω0 + αt
∆θ = ω0∆t + 1/2 α(∆t)^2
ωf^2 = ωi^2 + 2α∆θ
Torque
|
Torque- Push or pull that attempts to change the rotation of an object
Fulcrum- Point of rotation / pivot point = further from fulcrum increases ability to rotate Torque = Perpendicular force * Radius = rFsinθ If the radius is zero (force occurs at the fulcrum) then there is no torque |
|
Units of Torque = N * m
Static Equilibrium - Net force is zero and net torque is zero
Static Equilibrium - Net force is zero and net torque is zero
https://www.grc.nasa.gov/www/k-12/airplane/Images/torque.gif
Rotational Inertia
Rotational Inertia/moment of inertia- An object's resistance to a change in its angular velocity
Equation : I = mr^2
Equation : I = mr^2
- Radius is more important than mass in this equation
- The farther away from the pivot point the mass is distributed, the more rotational inertia the object has
|
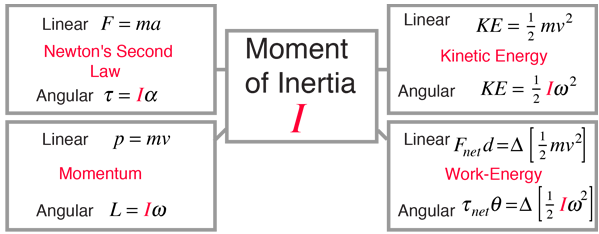
Based on the image to the right, it is clear that a moment of inertia is an extremely important part of describing rotational motion, energy, and momentum |
http://hyperphysics.phy-astr.gsu.edu/hbase/imgmec/mim.png
|
|
Here is a video on rotational inertia that I created using an online simulation. Link to the simulation |
|
Rotational Energy
Rotational Kinetic Energy = Energy due to the rotation of an object
0.5mr^2ω^2 (substituting the formula for rotational inertia)
An object can have both linear kinetic energy and rotational kinetic energy!!!
0.5mr^2ω^2 (substituting the formula for rotational inertia)
An object can have both linear kinetic energy and rotational kinetic energy!!!
Angular Momentum and Impulse
Angular momentum- An object's resistance to stop rotating
- Angular momentum = Rotational Inertia * Angular velocity L = I * ω
- Conserved quantity in isolated systems (can use this to make predictions just like we did with linear momentum)
|
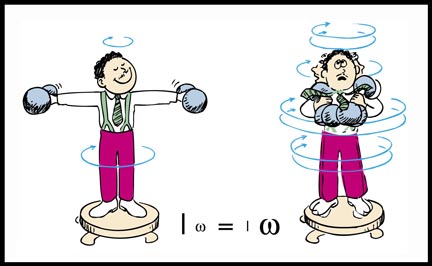
This picture helps explain the conservation of angular momentum, and it is similar to something we tried in class. When the man holds the weights out and spins, he has a large rotational inertia and a small angular velocity. Then when he pulls his arms in, his rotational inertia decreases because the radius decreases. Due to the conservation of angular momentum, the angular velocity must increase, so now the man is spinning very quickly.
|
https://styraki.com/images/CP//CP0851Turn.jpg
|
Angular impulse causes a change in angular momentum
∆L = ∑τ * ∆t (change in angular momentum is the area under a torque vs. time graph)
∆L = ∑τ * ∆t (change in angular momentum is the area under a torque vs. time graph)
Value |
Linear Momentum |
Angular Momentum |
Equations |
p = m * v ∆p = ∑F * ∆t |
L = I * ω ∆L = ∑τ * ∆t |
Isolated system |
Gains mass - speed decreases Loses mass - speed increases |
Rotational inertia increases - angular speed decreases Rotational inertia decreases - angular speed increases |
Non-isolated system |
Large force/small time or vice versa will increase linear momentum |
Large torque/small time or vice versa will increase angular momentum |
| Extended Bodies at Rest Mastering Physics.pdf |
| Rotational Motion Mastering Physics.pdf |
Widget is loading comments...
